
Email:
ТЕХНОЛОГИЧЕСКОЕ ОБОРУДОВАНИЕ

ВНИМАНИЮ КЛИЕНТА
СПРАВОЧНАЯ ИНФОРМАЦИЯ
СТАТЬИ И ИНФОРМАЦИЯ
|
Понравилась статья? Сохраните ее ->
|
|
Мехатронные модули линейного движения
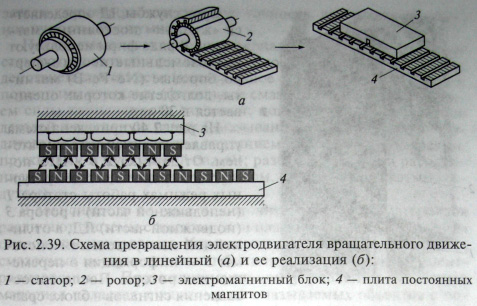
Мехатронные модули линейного движения строят на базе линейных двигателей (ЛД). Для линейных перемещений в станках до недавнего времени использовался привод подач с электродвигателем вращательного движения и механическими передачами, преобразующими вращательное движение в прямолинейное поступательное (зубчатая рейка, шариковая винтовая пара и др.). С целью исключить необходимость использования механических передач в приводе подач и реализовать концепцию приводов прямого действия возникла идея создать линейный двигатель, развернув статор 1 и ротор 2 электродвигателя вращательного движения на плоскости (рис. 2.39, а). Таким образом в одном мехатронном узле конструктивно объединяются приводной и исполнительный элементы привода. Обычно на подвижной части (рабочем органе станка — суппорте, столе и др.) располагают электромагниты 3 (рис. 2.39, б), а на направляющих (неподвижной части) — постоянные магниты 4. Движение в ЛД возникает благодаря взаимодействию магнитных полей постоянных магнитов и электромагнитных катушек, т.е. происходит непосредственное преобразование энергии в линейное движение.
Срок службы ЛД определяется «жизнью» постоянных магнитов. В ряде фирм используют редкоземельные неодим-фер-ро-боровые (Ne-Fe-B) магниты, долголетие которых оценивается в 30 лет.
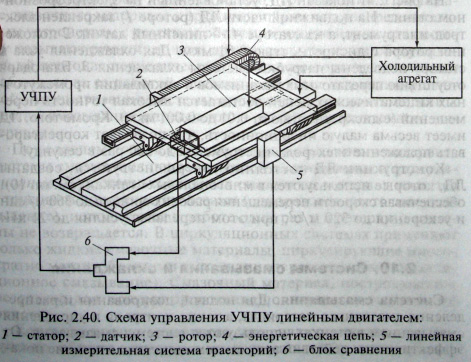
На рис. 2.40 приведена схема управления линейным двигателем. От датчика 2 в УЧПУ поступают сигналы о температурных режимах работы статора 1 (неподвижной части) и ротора 3 (подвижной части) ЛД, а от линейной измерительной системы 5 — информация о перемещениях ротора. После сопоставления сигналов в блоке сравнения 6 сигналы передаются в УЧПУ, далее управление перемещением ротора и работой холодильного агрегата осуществляется через энергетическую цепь 4.
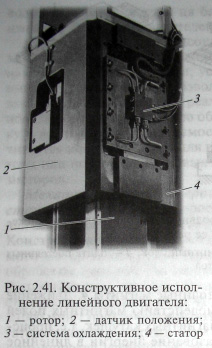
На рис. 2.41 показан ЛД, установленный на электроэрозионном станке. На подвижной части ЛД (роторе 1) закреплен элек-трод-инструмент, а на статоре 4 — линейный датчик 2 положения ротора с дискретностью 0,01 мкм. Для охлаждения узла к статору подведены патрубки системы охлаждения 3. Благодаря отсутствию передаточных механизмов и ликвидации промежуточных кинематических цепей достигается высокая точность перемещений (с дискретностью от 0,01 до 0,001 мкм). Кроме того, ЛД имеет весьма малую инерционность, что позволяет корректировать положение электрода-инструмента до 500 раз в секунду!
Конструкции ЛД постоянно совершенствуются, созданы ЛД, которые используются в многоцелевых станках, обеспечивая скорости перемещения рабочих органов до 360 м/мин и ускорения до 320 м/с2, при этом передавая усилия до 21 кН.
Copyright © 2005 — 2015, ООО "Станко-Пром"
При перепечатке статей и материалов, ссылка на сайт обязательна.
При перепечатке статей и материалов, ссылка на сайт обязательна.
